Abstract
For my independent study I am studying global illumination algorithms with an emphasis on GI in participating media. I have been working on a raytracer called StingRay which already supports photon mapping. The photon mapping implementation in StingRay currently supports speedups such as pre-computed irradiance, irradiance gradients and caching. I would like to extend this implementation to incorporate participating media.
Below is a high level overview of the work that I have done so far. I also provide a list of deliverables for the project.
Where does the light come from?
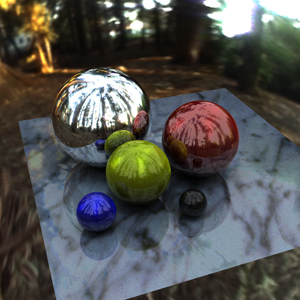
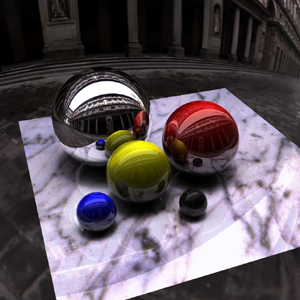
The scene below strictly just reflects the environment map using standard environment map techniques. The shadows were treated separately. Lately there has been some buzz on a technique called Ambient Occlusion. This is what I am using below for the shadows. Basically, the idea is that you have an all white light probe and then sample it. During this process you test for occlusion and generate the shadow maps. The shadow maps can later be combined with other passes of the rendering. This is basically a speed up algorithm but for our simple scene it doesn't speed up much. It just gives us cool shadows.
|
|
|
| StingRay rendering using RNL light probe. | StingRay rendering using Uffizi light probe. |
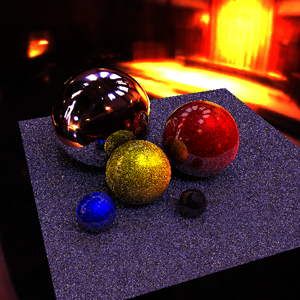
The renders above are using outdoor light probes that have large area light sources. If we were to sample it for the diffuse components of the scene it would not be that noisy. However, for other light probes containing smaller area light sources the images produced are very noisy. The image below is sampling the Grace Cathedral environment map with a standard Monte Carlo sampling algorithm. The noise is produced because sometimes the sample rays used for a surface point hit the bright light sources and sometimes they miss.
|
|
To remove this noise we would need to importance sample the environment map. A technique called Structured Importance Sampling, presented recently at SIGGRAPH '03, solves this problem very nicely.
The basic idea of structured importance sampling is to stratify an environment map and determine which regions are more important.Using this algorithm the environment map is hierarchically divided up into regions based on pixel intensity. Each level in the hierarchy represents similar intensities within a given threshold range. Higher levels in the hierarchy contain the brighter regions. During the hierarchical thresholding process the regions are are assigned a number. This number represents the number of samples to be used for the region. Brighter regions receive more samples then dimmer regions. Once the sample numbers are assigned, each of these regions are evenly divided into N partitions or stratums where N represents the number of samples assigned for the region.
Below is a rendering that uses standard Monte Carlo to sample the environment. It is very noisy because the Grace probe contains smaller area light sources as the sun light enters through the windows. The sampling algorithm used evenly divides the hemisphere above each point into equal sized stratums from which jittered samples are taken. Sometimes the sample hit the light sources and sometimes they miss.
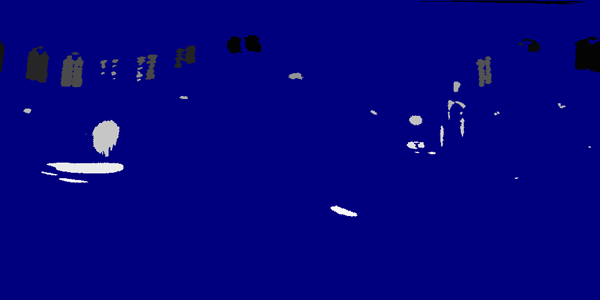
However, using structured importance sample technique we can first analyze the environment map for important regions. The images below show the threshold maps for 2 of the hierarchies used in the structured importance algorithm for the grace probe.

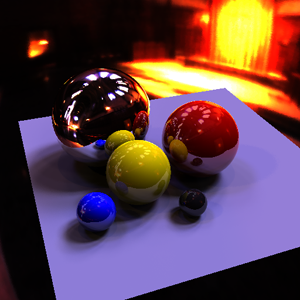
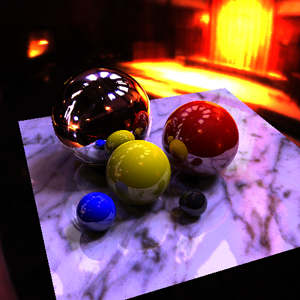
The left image below is setup exactly the same as the noisy image above, except that it is using structured importance sampling. Look at the multiple shadows generated from the various light sources. I believe the darkest shadow is created by direct sun light entering one of the windows.
|
|
|
| StingRay renderings using structured importance sampling on the Grace Cathedral environment map. (Left) uses a white diffuse table top while (Right) a HDR marble material is used. | |
Volume Rendering
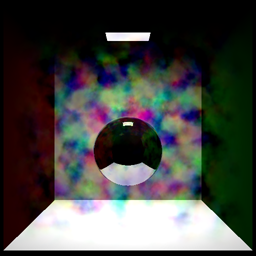
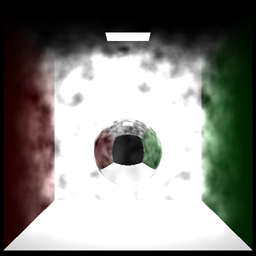
I use a shader model where volume shaders are executed at each step to compute the density and color. The shader is passed standard information such as position, normals, etc. The normals are computed using finite differencing. Ken Perlin offers a method where the normal is computed by taking the difference of the density at P and a neighboring density. Using this method the normal will point in the direction of most change. The images below show a smoked filled Cornell Box using only direct lighting.
|
|
 |
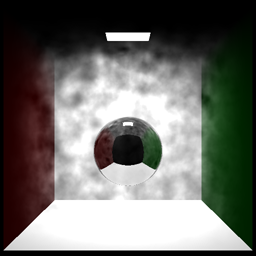 |
| No shadows | Visualization of the normals | N dot L lighting |
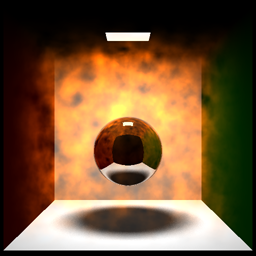 |
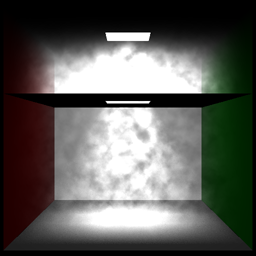 |
| Orange cloud with shadowing effects. | A square hole in floor emphasizes lighting effects. |
GI in Participating Media
Deliverables for Project
- Write up for Participating Media
- Source Code for StingRay
- Volume caustics in particpating media
- GI in fog, smoke, dust, and gases.
References
| [1] | Jensen, Efficient Simulation of Light Transport in Scenes with Participating Media using Photon Maps, Proceedings of SIGGRAPH'98, pages 311-320, Orlando, July 1998 |
| [2] | Jensen, Visual Simulation of Smoke, Proceedings of SIGGRAPH'01, pages 15-22, Los Angeles, August 2001 |
| [3] | Jensen et al, A Practical Model for Subsurface Light Transport, Proceedings of SIGGRAPH'01, pages 511-518, Los Angeles, Aug 2001 |
| [4] | Jensen et al, A Rapid Hierarchical Rendering Technique for Translucent Materials, Proceedings of SIGGRAPH'02, pages 576-581, San Antonio, July 2002. |
| [5] | Jensen et al, Light Scattering from Human Hair Fibers, Proceedings from SIGGRAPH'03, San Diego, July 2003 |
| [6] | Pharr et al, Monte Carlo Evaluation of Non-Linear Scattering Equations for Subsurface Reflection, Proceedings of SIGGRAPH'00 |
| [7] | Agarwal et al, Structured Importance Sampling of Environment Maps, Proceedings from SIGGRAPH'03, San Diego, July 2003. |